Troubleshooting
Limitations
AI Implementation
The CrowdSystem is currently not supported for flying agents (as it requires specific features of the navmesh).
Runtime Generation
Dynamic allows for procedural levels,
or a manually triggered rebuild.
However, constantly moving objects (such as moving platforms) as blocking meshes
are not supported, nor are blocking rigid bodies.
Please see here for more
details.
Level Streaming
Spawn Nav Data in Nav Bounds Level setting in
Project Settings means different navigation data can be serialised to different
sublevels and manually loaded as required.
Pathfinding Performance
Optimisations to increase speed at the cost of accuracy have been implemented, please see here for more details.
There is also the option of asynchronous pathfinding using the C++ function:
UFlyingNavFunctionLibrary. From Blueprints you can use the
Find Path To Actor/Location Asynchronously nodes.
Please Note: when using flying navigation, do not use the default
UNavigationSystemV1::FindPathAsync, as it can cause a crash on PIE
exit.
At the present time, the behaviour tree task
MoveTo performs
pathfinding synchronously, so optimisations are recommended for complex scenes
if you are using behaviour trees.
Viewport Drawing Performance
DebugDraw functions and will
therefore scale very well.
However, the neighbour connection drawing does use
DebugDraw
functions, and should not be used for high resolution octrees.Also, the visualisation gathering step (copying data from the navigation data to the rendering thread) will block the main thread, and runs whenever a navigation data option is modified. This means that changing options will lag slightly, depending on the currently built resolution. It's recommended to build on a lower resolution to change options, or clearing and rebuilding the navigation data.
One Octree per Level
AFlyingNavigationData in C++ (one per agent type), the requirement
for different agent radii and heights can be mitigated.
Request a feature on GitHub
Troubleshooting
My Actor Isn't Moving!
- A FlyingNavigationData actor is required, which should be automatically spawned in the level (see below).
- If an invalid default agent is selected in Project Settings, pathfinding
can fail.
-
If using multiple agent types, make sure that at least one of the radius, height and step height of each agent is different from each other.
These properties are used as a key hash in a lookup table, so if they're all the same only one is ever registered (the one furthest down the table).
This logic is in
UNavigationSystemV1::GetNavDataForProps, and is the source of many headaches when working with multiple agents. It's worth becoming familiar with this function if you're having issues with multiple agents. -
The AI controller needs to be requested to move.
Using
MoveToor a behaviour tree does this for you, but for theFindPath*nodes you need to use the Request Move node. -
The PathFollowingComponent of the AIController might be a
CrowdFollowingComponent. Make sure you're not using a
DetourAICrowdController.
The CrowdSystem is currently not supported for flying agents (as it requires specific features of the navmesh).
FlyingNavigationData Actor Not Spawning
This will occur if you have done the following:
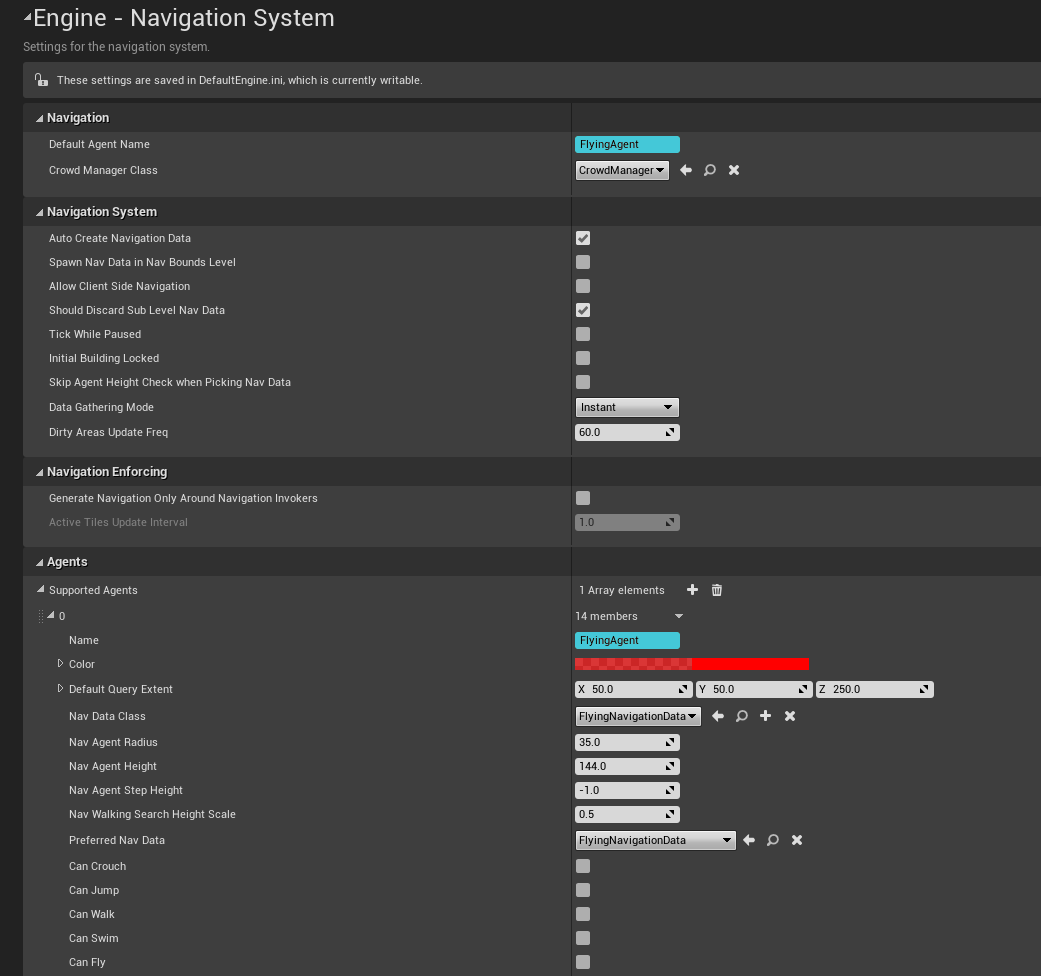
- Created an agent in Project Settings with
Preferred Nav Dataset toFlying Navigation Data. -
Checked your agent is supported under
Supported Agents Mask, in both Project Settings and World Settings (underWorld/Navigation System Config/Supported Agents Mask)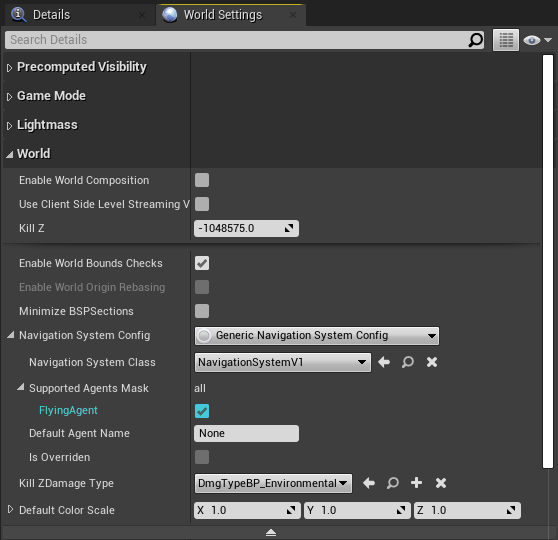
- Placed a
Nav Mesh Bounds Volumein the world. - Reopened the level.
Mesh is Blocking and Shouldn’t Be / Non-blocking and Should Be
There are 3 options which affect a mesh's blocking status. In order for a mesh to be blocking, it must have these options:
Collision/Can Ever Affect Navigation = truePhysics/Simulate Physics = false-
Navigation/Is Dynamic Obstacle = falsein the Static Mesh asset settings.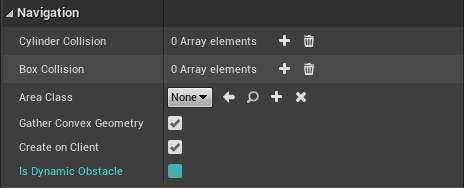
Conversely, toggling any of these settings will make the mesh non-blocking.
In most cases the best option is setting
Collision/Can Ever Affect Navigation = false on the Static Mesh
spawned or placed in a level.
The Is Dynamic Obstacle option impacts all instances of that
Static Mesh, and so could be useful for always non-blocking meshes.
And obviously Simulate Physics = true is a simulated rigid
body.
A reload may be required before building the navigation for the changes to
take effect.
Unreal Engine crash with
Assertion failed: InNodeIndex < (1 << 22)
This means you have pushed the Max Detail Size too far, and the node index
parameter has overflowed.
To fit nodes compactly, unique identifiers need to fit into a 32 bit
integer,
22 bits of which are reserved for the node index in a given layer.
The number of nodes in a layer has exceeded 2^22 = 4,194,304,
and you should really increase that Max Detail Size.
We can pretty much guarantee that you don't need it that low, but if you
think you do open an issue on GitHub and we'll see what we can do.
Cannot open include file: '*.h': No such file or directory | A verbose and unhelpful linking error such as:
unresolved external symbol "__declspec(dllimport) public: bool __cdecl FSVOLink::IsValid(void)const " (__imp_?IsValid@FSVOLink@@QEBA_NXZ) referenced in function "public: enum ENavigationQueryResult::Type __cdecl FSVOPathfindingGraph::FindPath(struct FVector const &,struct FVector const &,struct FSVOQuerySettings const &,class TArray<struct FNavPathPoint,class TSizedDefaultAllocator<32> > &,bool &)" (?FindPath@FSVOPathfindingGraph@@QEAA?AW4Type@ENavigationQueryResult@@AEBUFVector@@0AEBUFSVOQuerySettings@@AEAV?$TArray@UFNavPathPoint@@V?$TSizedDefaultAllocator@$0CA@@@@@AEA_N@Z)
If you wish to access the plugin C++ API, you will need to link against
FlyingNavSystem. You will also need to link against the
NavigationSystem module if you call parts of the built in
Navigation System.
In your project .Build.cs file, you should have:
PublicDependencyModuleNames.AddRange(new string[] { "Core", "CoreUObject", "Engine", "InputCore", "NavigationSystem", "FlyingNavSystem"});
For example, in the benchmark project I use
FNavigationQueryFilter to perform a path query, which requires
linking to NavigationSystem.
Goal Location in Blocked Volume when using a Pawn as a Pathfinding Goal
When using a Pawn as a pathfinding goal, it is a good idea to set the
Base Eye Height to zero.
Otherwise, the pathfinding algorithm will use the bottom (or ‘feet’) of the
Pawn as the goal location, rather than the centre.
The feet are more likely to be inside a blocked area.
Note: This does not apply to Characters, which unfortunately uses a
hardcoded CapsuleComponent->Bounds.BoxExtent.Z offset for the
feet.
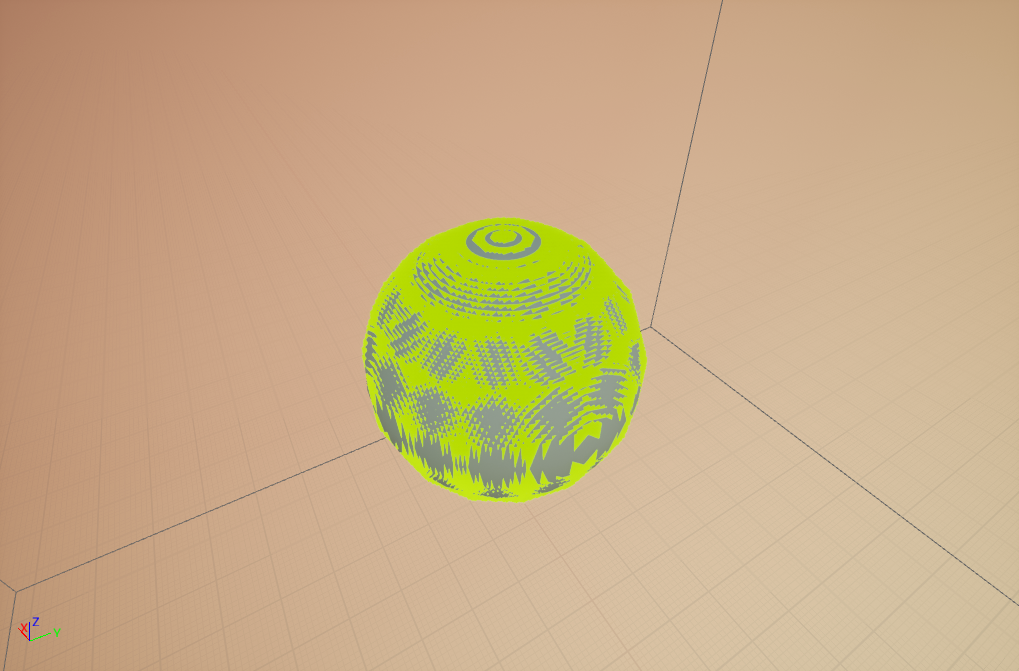
Sphere Meshes Poke out of the Voxels
Using a sphere primitive as the simple collision on a mesh can sometimes be
inaccurate, as the builtin geometry gathering code converts it to a low-res
triangle approximation.
This can mean bits of spheres poke out of the voxels, but this can be
rectified with the Use Agent Radius checkbox under the advanced
Generation options.
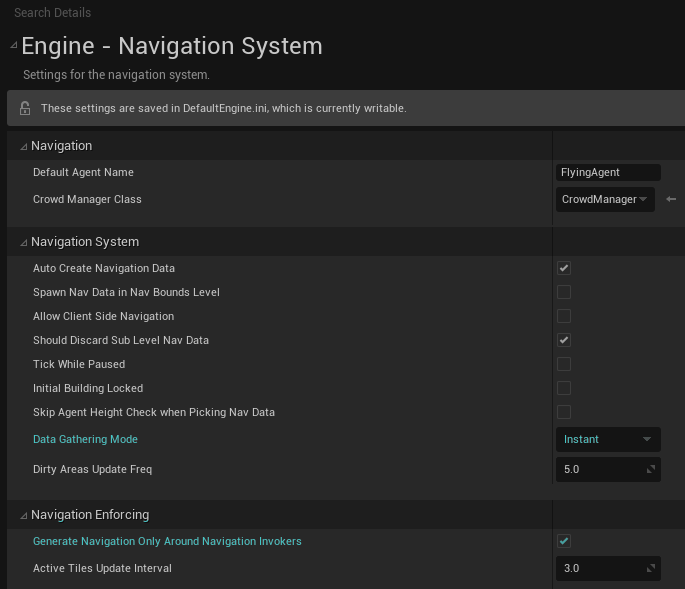
Some octants of the bounds are not rasterised properly (landscapes)
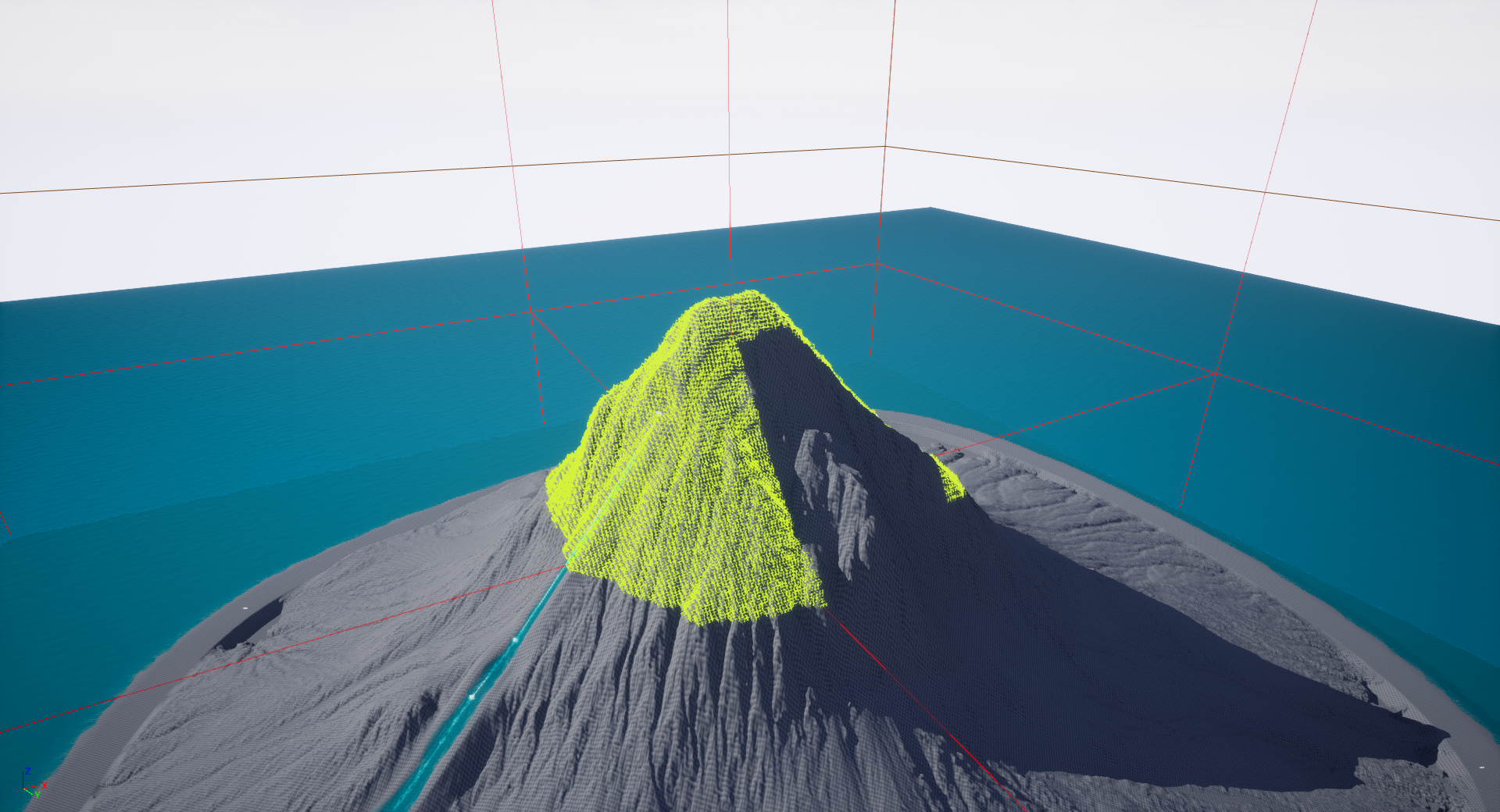
If "Data Gathering Mode" is set to "Lazy" and "Generate Navigation Only Around Navigation Invokers" is turned on, the landscape geometry is not available on every thread. Therefore, only some octants have access to that data. The current workaround is to set Data Gathering Mode to "Instant" and reload the level. This only needs to be done at build time, so it can be changed back to "Lazy" for production.
If you're still having problems, please don't hesitate to open an issue on GitHub or have a chat on the Discord.
Report a bug on GitHub